
In previous articles, we’ve looked at the importance of CANBus and how to find and prepare a module for bench investigation. In this article, we’ll try to get a stand-alone module operational using BusMaster to replay a log file, and hopefully be able to interact with it.
Using a BusMaster log to excite the CANBus
For the stand-alone module to wake up and become operational it expects to see a number of CANBus messages. This could be a few simple messages such as the ignition state, or even just a simple ‘wake up’ command. For something as complicated as the FCDIM, it’s probably going to take a big number of messages to come to life.
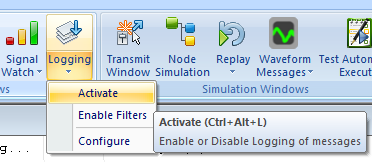
Fortunately, the nature of CANBus means we can take a recording from a working system and play it back to the stand-alone module. We’ve already looked at a connection to the medium speed CAN bus. To make a recording, we simply set the destination in the ‘Logging’ control then use ‘Activate’ to start and stop the log while connected. We want to use a log of 30 to 60 seconds long.
Setting up a log file for replay
A log file of 30 to 60 seconds will contain multiple repetitions of all the messages we need to excite the stand-alone module. Because the FCDIM takes a little while to power up and receive all the messages it needs to become active, a 30-second log simply isn’t going to be long enough to interact with the screen.
To overcome this we need to replay the single log file repeatedly, and BusMaster can help us with this. The reason we want to use a small log file rather than just make a long one is to reduce the amount of work BusMaster does. This makes BusMaster more responsive and more reliable!
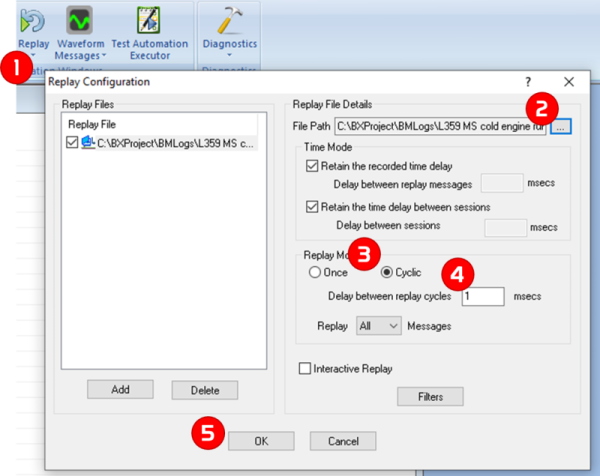
The steps to set up a replay of a log file in BusMaster are quite simple.
- Select the Replay Configuration from the navigation ribbon
- Select the log file you want to replay
- Tell BusMaster you want to repeat the play back (cyclic)
- Set the delay between replays. For Medium Speed use 10ms or less
- ‘OK’ to use these settings, and don’t forget to save the configuration
The next time you ‘Connect’ to the bus, BusMaster will start to transmit the log file repeatedly until you ‘Disconnect’. You’ll be able to distinguish the transmitted signals as they will who as ‘Tx’ in the message direction column of the message window.
Waking up up the stand-alone module.
Connect your module to the CAN adapter using the direct connection harness we made in the previous article. Connect and turn on a power supply. You’ll probably see the current draw of the module increase, then reduce. The module will do some self-checks when powered, but then it sees no CAN traffic, it will go into a sleep mode. Load up BusMaster with your preconfigured configuration.
Okay, this is it, the big moment. Hit the “Connect” button!
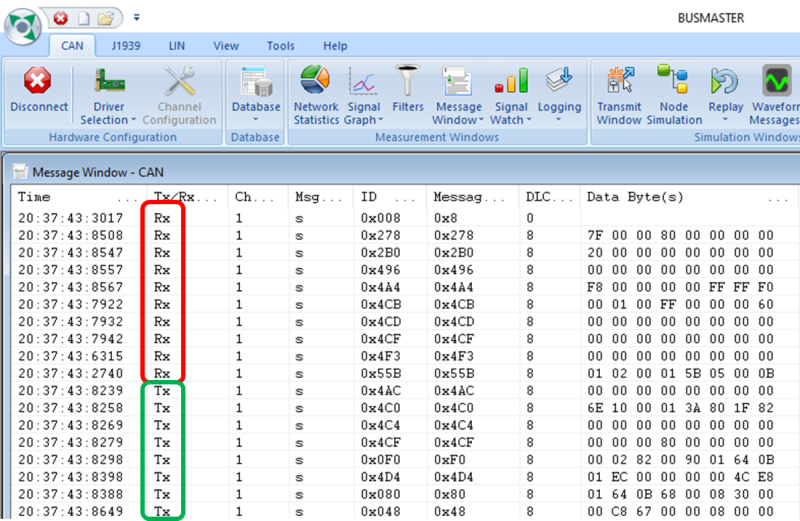
You should now see something like the screen above. Our log is being played back onto the CANBus and is shown as ‘Tx’ messages in the green box. The really important bit is the ‘Rx’ messages in the red box. This tells us the module has woken up and is talking back to the simulated modules.
Stand alone, awake and operational!
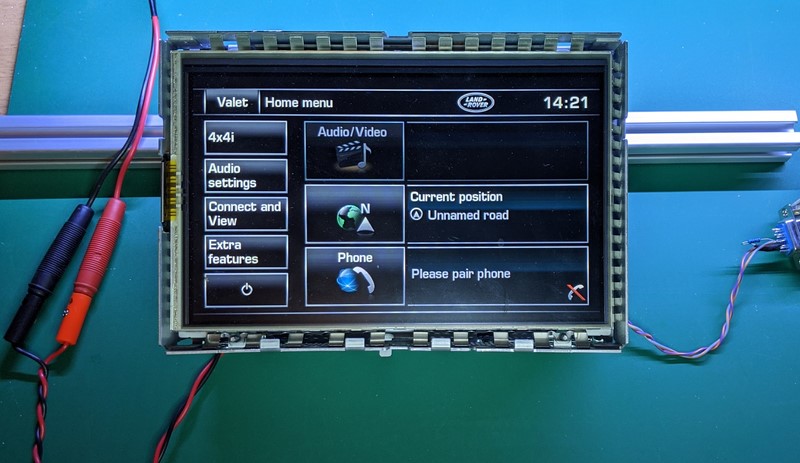
In this case, the FCDIM woke up and after turning on and off a few times, became functional. The touch screen allowed navigation around some of the functions and settings could be changed. As this is a module I’ve been working on for a while, it already has some extra features turned on for us!
Next steps, starting our database.
Now we have a module up and working, we can start to investigate the received messages. We want to document these messages so we can repeatedly refer to them. In the next article, we will look at starting a CAN database, and breaking down the messages.
M
Hello,
I bought the navigation display for Jaguar X351 on ebay. Your article has been of great help to me.
I made and connected a power cable, but as you mentioned it didn’t work.
My next step is to purchase a CANBUS Adapter and connect it to it.
But I have no data to send to the navigation. can you possibly give it to me? Thank you for your help.
Hello Ryan Lee,
I have sent you a very short Medium Speed log by email.
If you are using BUSMASTER you will need to use the built-in conversion tool.
Let me know if the log works. It may be too small, but it is the only one I have available at the moment
Cheers
M
Hello, M.
I really appreciate you.
I’ll try it and let you know the results.
Without you, my research would not have progressed.
Peace
R